Jesse Himmelstein
Developer, game designer, researcher, teacher & entrepreneur
Welcome to my personal website.
You’ll find occasional blog posts, links to my projects, and talks that I found valuable.
-
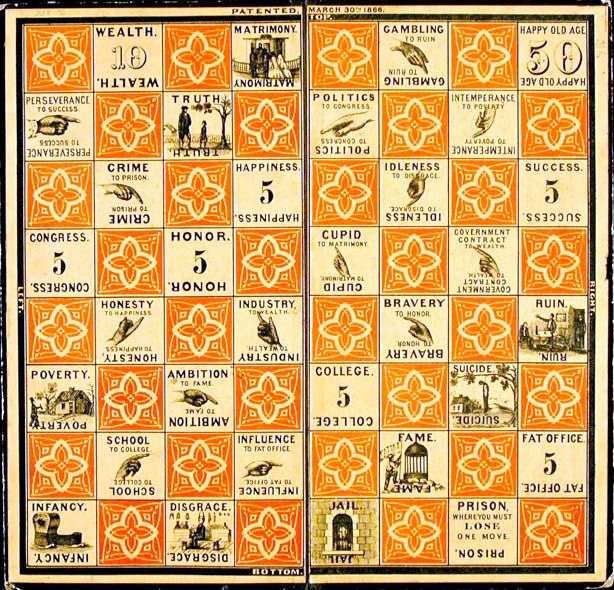
What’s the meaning of Life, the board game? I was delighted to find that my friend David Argellies bought a copy of this Milton Bradley classic at a yard sale. (Also, it turns out the the game is called “Destins”…
-
Reviving Paradise: The Art and Philosophy Behind Terra Nil’s ‘Reverse City Builder’ Journey
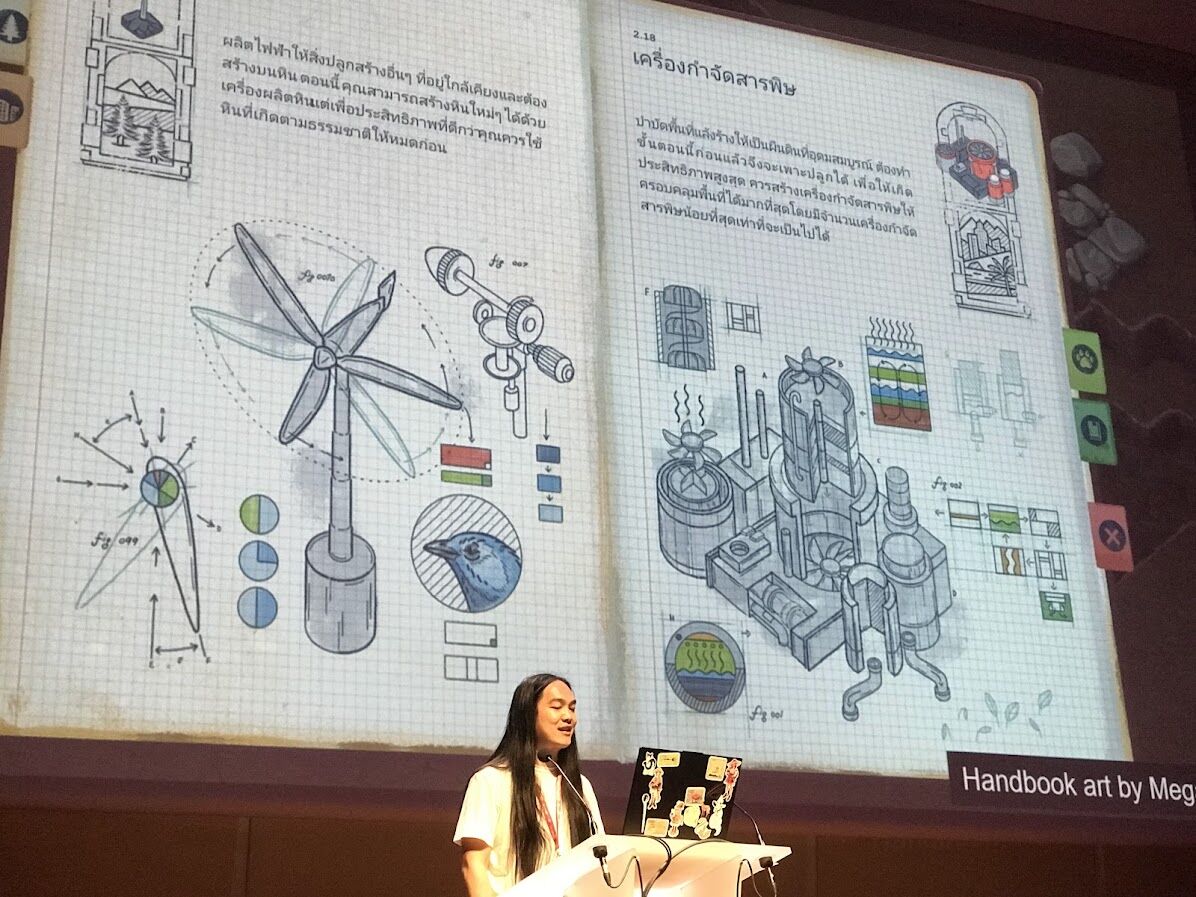
One of the coolest conferences I saw at Game Camp was about the art process behind the “reverse city builder” game Terra Nil, given by the tech artist Jonathan H. from the South African studio FreeLives. In this game, you…
-
News Sites Are Betting on Games—But Are They Missing the Bigger Opportunity?
American news sites are betting big on video games. But are they just the same old ideas? The New York Times had an article early in the summer about how news websites are turning to video games to gain subscribers…
-
Dave the Diver’s Early Access Strategy: Lessons from Jaeho Hwang at Gamecamp
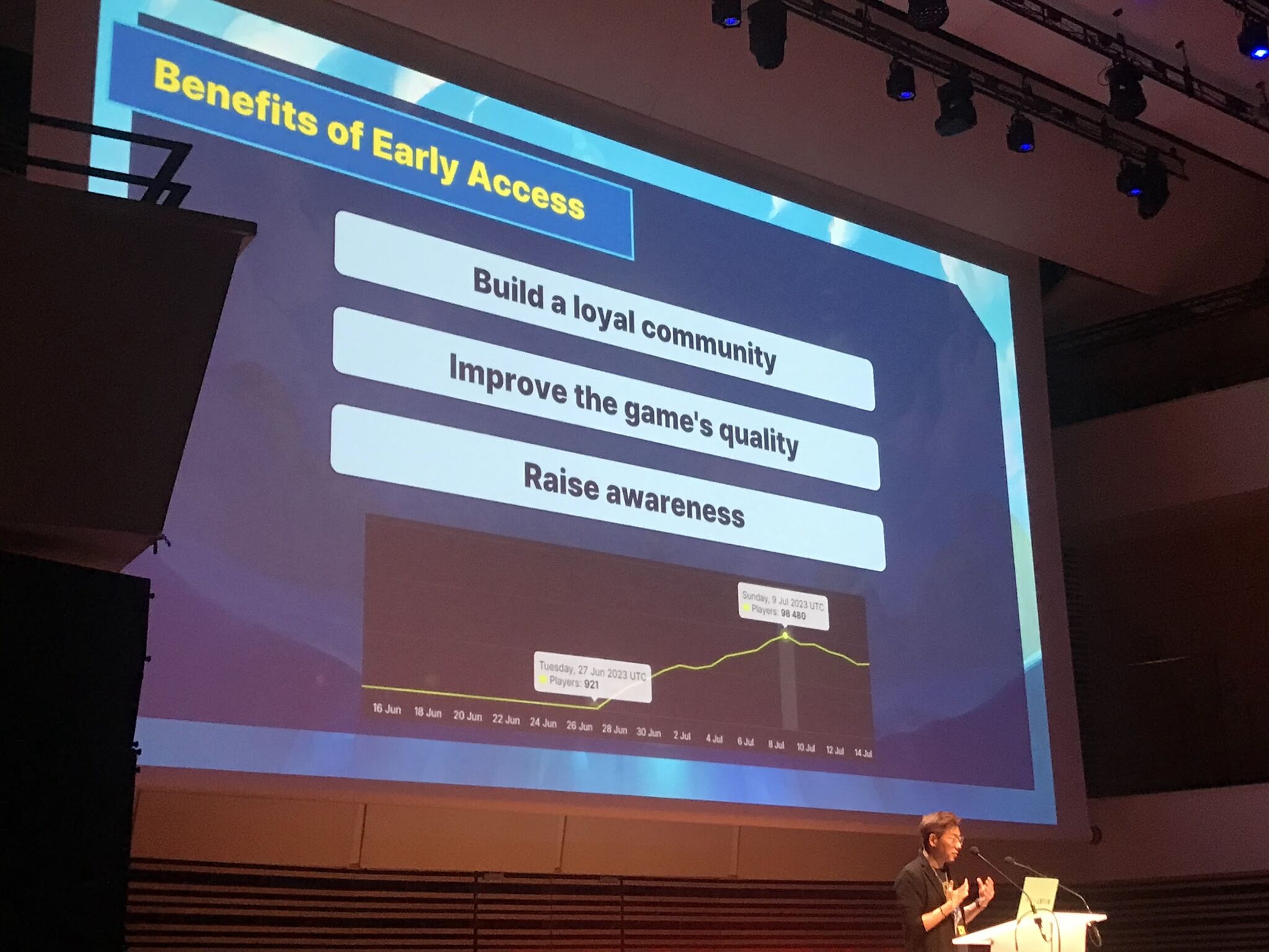
What’s Dave the Diver’s Early Access secret? Dave the Diver is one of break-out hits from 2023. If you haven’t heard of it, it’s a surprising mix of mechanics – fishing/collecting during the day and running a restaurant at night,…
-
Exploring Game Design Values: Insights from Nikhil Murthy at ADDON
This is one my favorite talks from ADDON! Nikhil Murthy examines implicit messages that frame game designs in a bunch of different genres, including farming and exploration games. It’s a fascinating subject, and I love thinking about what values a…
-

Building a “Puzzle Factory” for CRISPR Crunch
CRISPR Crunch is a fast-paced puzzle game for mobile, in which the player fends off waves after wave of attacking viruses. To kill a virus, you match the sequence of colors on the virus DNA with those in the hexagonal grid…
-
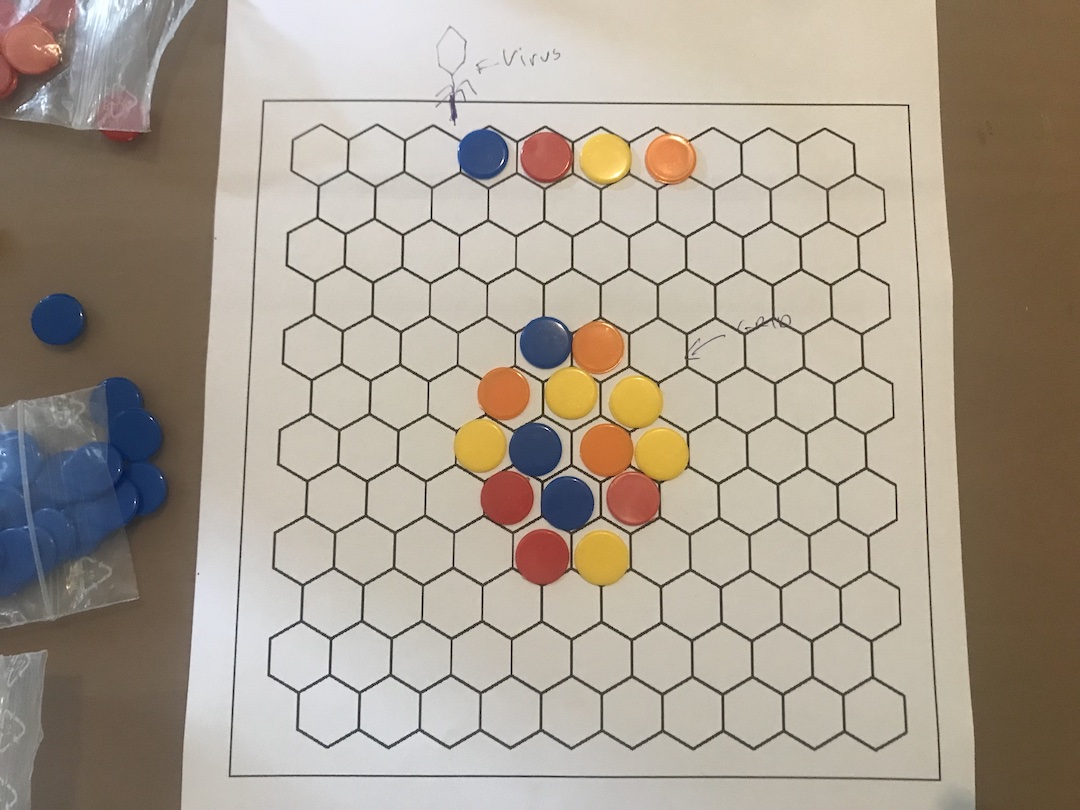
How CRISPR Crunch Transformed from Tower Defense to Pattern-Matching Puzzle
Originally posted on playcurious.games Our game CRISPR Crunch is a fast-paced puzzle game for mobile, in which the player fends off waves of attacking viruses by matching the sequence of colors on the virus DNA with those in the hexagonal grid in…
-

Cursed Problems in Game Design
-

The Illusion of Choice
-
Remix your Old Board Games
Instead of always playing board games to same old way, why not try out new variants that could be a lot more fun? Or better yet, make up your own? Based on the 1991 book “New Rules for Classic Games”,…